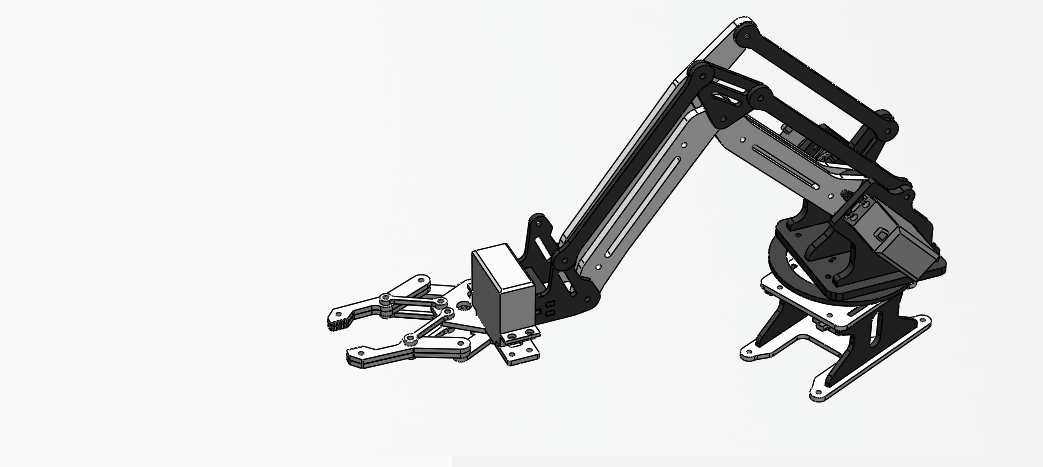
简单四自由度机械臂的正逆向运动学求解及单片机实现
机械臂运动学求解概述 应用场景即其目的 在机器人设计及其控制中,往往认为机器人主要由三种组件构成,即感知器件、执行器件和智能器件。而机械臂作为执行器件中非常重要的一种给机器人提供了更具灵活性的改造世界…
|
147,919
|
|
|
8101 字
|
32 分钟
关于“项目和比赛中什么才是好的“的不成熟的看法
时间如白驹过隙,自2019年入学以来到现在我也已经大三了,在这三年的时间里参加了不少比赛,也参与或个人制作了不少的项目,但大多没有取得很好的结果,也让我时常产生自我怀疑,怀疑自己的能力与水平。 记得大…
|
8,645
|
|
|
1671 字
|
7 分钟
碎思杂想20220404
尝试有用的东西和尝试没有用的东西,都有机会给世界带来改变。——摘录
|
10,808
|
|
|
32 字
|
几秒读完