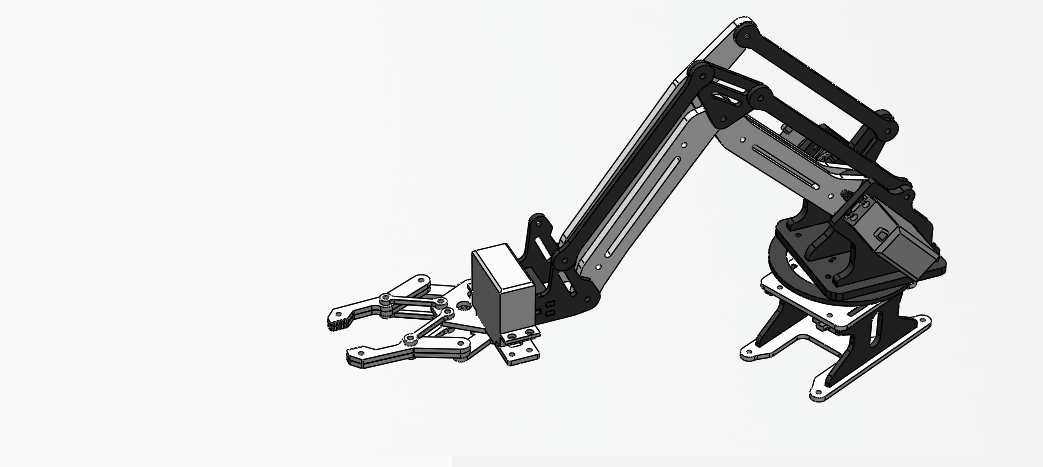
简单四自由度机械臂的正逆向运动学求解及单片机实现 机械臂运动学求解概述 应用场景即其目的 在机器人设计及其控制中,往往认为机器人主要由三种组件构成,即感知器件、执行器件和智能器件。而机械臂作为执行器件中非常重要的一种给机器人提供了更具灵活性的改造世界… 2022-4-17 21:13 | 147,919 | 2 | 硬件工坊 | 路何求 8101 字 | 32 分钟